We are pleased to announce that Joanne Harbluk will give a presentation at CLW 2014. Joanne’s presentation will focus on methods used to estimate cognitive load using eye gaze measures.
All posts by Andrew Kun
Registration is open
To register for the workshop and the conference please go to our registration system.
The early registration deadline is August 15, 2014, 23:59 PST.
Hands-on DRT
A portion of CLW 2014 will be devoted to the Detection Response Task (DRT), which is an ISO standard. In fact, we are planning to provide workshop participants an opportunity to work with DRT hardware. Specifically, we will conduct short experiments in which participants will operate a simulated car and engage in an N-back secondary task. We will then estimate their cognitive load using DRT hardware.
If you have an Android phone, you can download AgeLab’s N-Back App and start preparing for the experiments!
CLW 2014 announcement
We are excited to announce that CLW 2014 will be held at AutomotiveUI 2014 in Seattle, WA. The half-day workshop will take place in the morning of September 17.
The workshop has three goals:
- Describe how a few measures of cognitive load are collected and describe the likely advantages and disadvantages of the measurements, problems with their use and solutions that they provide in enhancing understanding: For each measure, there will be one or possibly two invited papers that will provide an overview of each measure selected. The presentation will describe current standard data collection procedures for each measure including subject selection, IRB issues, training, practice, and data logging. The presenter should go beyond recounting standard protocol, describing the practical issues they have experienced with each measure. The focus is on the method.
- Demonstrate how they are collected: Those attending the meeting are invited to bring hardware and software to demonstrate the measures in question. This includes DRT and eye fixation hardware and software, as well as a driving simulator or driving video game to show how the data are collected.
- Describe how the data from those measures are reduced and analyzed: To some extent, this will involve summarizing existing practice codified in standards. However, we are looking for presenters to go beyond what is in those documents, describing practical problems of filtering and cleaning up the data, censoring, rules for eliminating outliers, methods of quantifying lost data, identifying potential confounding factors and situations that arise with the use of a measure can bias interpretations of results and software that can help produce results. This should not be viewed as an opportunity to present a paper describing results.
The workshop organizers will bring together a number of experts from government, industry, and/or academia to address the above topics. In addition, position papers on these topics are solicited – please see our CFP. The primary focus will be on discussions in detail about practical issues, and measures that are, or will be, standardized. The papers will appear in the Adjunct Proceedings, and will be presented at the workshop in poster format.
2013 workshop report
Around 30 people from industry and academia attended CLW 2013.

The workshop featured two invited presentations. First, Klaus Bengler gave a keynote address in which he discussed human-computer interaction in automated vehicles. Klaus’s presentation was very well received, especially as driving automation is quickly becoming more than just a dream. For example, AutomotiveUI 2013 featured a live demo of TNO’s Cooperative Adaptive Cruise Control (CACC).
In the afternoon Tuhin Diptiman joined us via Skype to share his assessment of NHTSA’s Manual-Visual guidelines. This discussion sparked a great deal of interest and discussion, and we expect that this interest will carry over if CLW is organized again in 2014.
In addition to the invited presentations CLW 2013 featured seven presentations by workshop participants, covering topics from utilizing physiological measurements for cognitive load assessment, to managing cognitive load using ambient displays.
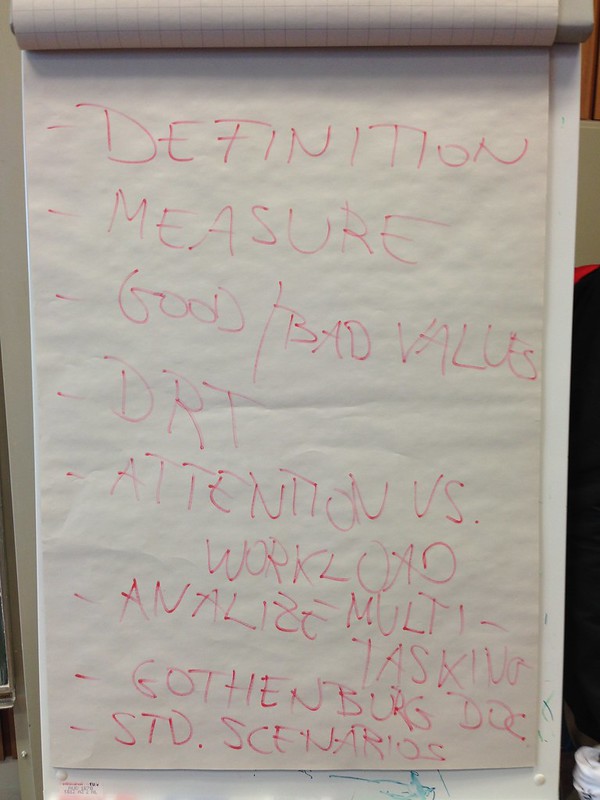
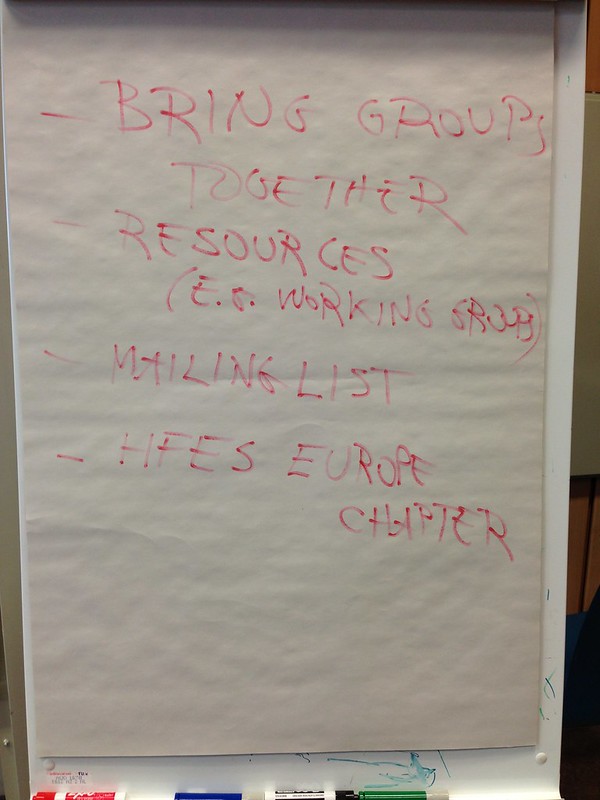
We concluded the workshop with suggestions for next steps (see images below – click for larger versions). The main ideas focused on three groups of issues:
- There’s a need to further discuss the basics, such as the very definition of cognitive load, and its relationship to concepts such as attention.
- We need to improve and standardize methods/techniques. E.g. what are values of lane position variance that indicate that cognitive load has increased too much in a particular context? And how can we use the Detection Response Task (DRT) for evaluating in-vehicle interactions?
- There is a need to provide CLW participants with a way to interact between workshops, perhaps using a LinkedIn group.
The organizers would like to thank Microsoft Research for their financial support of CLW 2013. Thanks to Shamsi Iqbal for securing this support. We thank Klaus and Tuhin, as well as the other presenters, for giving engaging talks. Finally, we thank all of the workshop attendees for raising questions, discussing posters, and sharing their knowledge and expertise.
Pictures from the workshop are available on Flickr.
Microsoft Research sponsors CLW 2013

Announcement: Tuhin Diptiman to discuss NHTSA visual-manual guidelines
Implications of NHTSA Visual Manual Guidelines to the Design and User Experience of In-vehicle Interfaces
Tuhin Diptiman
Human Factors Group
Toyota Technical Center
Ann Arbor, USA
Abstract
NHTSA released visual manual guidelines in 2013 to limit the potential of distracted driving caused by in-vehicle telematics by loosely tying together guidelines published by the Alliance and JAMA, and adding additional parameters such as “per se lockouts”. While the implications to each automotive OEM may vary greatly, these guidelines have the potential to severely limit vehicle cockpit design and user interfaces which are at the core of the driving experience. NHTSA plans to reign in the automakers by increasing the scope and depth of vehicle systems by limiting non-driving tasks such as telematics, navigation, and entertainment to lower than the levels used by the Alliance and by including driving related tasks such as cruise and climate controls.
A caveat – most experts agree that a severely restricted in-vehicle interface will further push the driving population to use the handheld devices which have been documented to be inappropriate for use while driving but which allow for an unrestricted user experience. While the unintended safety implications of a heavily restricted in-vehicle interface and an unrestricted handheld interface is as yet unknown, this area of driver distraction will continue to be the forefront of research and debate for quite a while to come.
Biography
Tuhin Diptiman completed his BSE and MSE in Industrial Engineering from the University of Iowa in 2002 and was a member of the Industrial Engineering Honor Society. His research involved a preliminary investigation in measuring emotion using physiological measures. After completing his thesis he joined the Crash Avoidance Metrics Partnership (CAMP) a consortium of Ford, GM, Toyota, Nissan and the US Department of Transportation and worked as a research engineer on the prestigious Driver Workload Metrics (DWM) project to study surrogate metrics to identify, measure and mitigate driver distraction.
He joined Toyota in 2008 to support Toyota’s on-going expansion of driver distraction research and human-machine interface (HMI) development in the US. His primary responsibility is to ensure that all Toyota navigation and telematics systems development for the US market are designed in conformance with Toyota’s guidelines which are based on the Alliance guidelines. As a human factors engineer he has played a significant role in supporting the development of interfaces related to multi-function displays, steering switches and navigation/telematics systems. His was instrumental in creating the HMI for the Toyota Entune Apps system, the first of its kind for any automotive OEM. He has been instrumental in shaping Toyota’s policy and on-going research on driver distraction and currently he is leading Toyota’s interpretation of the NHTSA visual manual guidelines and investigating its impact on product design and development.
Announcement: Klaus Bengler’s keynote talk at CLW 2013
Cooperative Driving as a New Paradigm for Highly Automated Vehicles
Klaus Bengler
Technische Universität München
Abstract
More than 125 years of automobility remind us that we should be aware of the fact that individual mobility is based on the fact that the driver contributes exceptionally high activity and human performance in the human-vehicle system. Besides improved vehicle technology this human factor is crucial to avoiding accidents in critical situations. However, critical incidents and accidents can often be caused by human error or limited capacity. Since the 90s these effects have been successfully countered with a variety of driver assistance functions. Sensory deficits of the driver and misperceptions are compensated by technical sensors. Drivers use these assistance systems temporarily and shall be assisted in the execution of sub-tasks of the driving task where they remain – following the Vienna Convention – in the supervisory role.
Much of the automotive period is thus characterized by the fact that the driver must manage the driving task for the most part alone and may delegate sub-tasks only for a short time. The great advantage of the car was a significant gain in mobility, based on various assistants, in addition to the additional active safety, leading to sometimes monotonous driving. The potential automation or partial automation of driving is not only more of the same but a radical qualitative and quantitative change in individual mobility, provoking many questions in the area of human factors and human-vehicle interaction.
 Biography
Biography
Klaus Bengler graduated in psychology at the University of Regensburg in 1991 and received his Doctorate in 1994 in cooperation with BMW. After his diploma he was active on topics of software ergonomics and evaluation of human-machine interfaces. He investigated the influence of additional tasks on driving performance in several studies within EMMIS EU project and in contract with BMW. Multifunctional steering wheels, touchscreens and ACC-functionality are examples for the topics of these investigation.
In 1997 he joined BMW. From several projects he is experienced with experimental knowledge and experience with different kind of driving simulators and field trials. At BMW he was responsible for the HMI project of the MOTIV program a national follow on program of PROMETHEUS. He was work package leader in an actual EU project Speechdat Car, dealing with voice recognition in vehicles. Within BMW Research and Technology he was responsible for projects on HMI research. He was active as a subprojectleader for subproject 2 “Evaluation and Methodology” within the EU funded integrated project AIDE. He is active member of ISO TC22 SC13 WG8 “Road vehicles – Ergonomic aspects of transport information and control systems.”
Since May 2009 he is leader of the Institute of Ergonomics at Technische Universität München which is active in research areas like digital human modeling, human robot cooperation, driver assistance, automated driving and human reliability. Among intensive industrial cooperation the Institute is engaged in the funded Projects DH-Ergo on Digital Human Modeling and ECOMOVE on anticipative driving and D3COS.
CLW 2013 new submission deadline is September 13
Due to multiple requests we are extending the workshop submission deadline to Friday, September 13. Yes, Friday the 13th. You should probably spend that day indoors anyway, so might as well be writing your CLW paper.
2012 workshop report

Overview
Over 35 people from government, industry and academia attended CLW 2012.
For CLW 2012 the organizers made the decision to involve a large number of experts in the workshop, instead of only including contributions by authors responding to our CFP. Thus, the CLW 2012 program included three expert presentations, as well as a government-industry panel with four participants. Each of these expert participants discussed unique aspects of estimating and utilizing cognitive load for the design and deployment of in-vehicle human-machine interfaces.
Bryan Reimer opened the expert presentations with a discussion of the relationship between driver distraction and cognitive load. Next, Bruce Mehler discussed practical issues in estimating cognitive load from physiological measures. Finally, Paul Green discussed how cognitive load measures might fit in with the NHTSA visual-manual guidelines.
The expert presentations were followed by a government-industry panel. Chris Monk (Human Factors Division Chief at NHTSA) presented the NHTSA perspective on cognitive load and HMI design. Jim Foley (Toyota Technical Center, USA) introduced the OEM perspective. Scott Pennock (QNX & ITU-T Focus Group on Driver Distraction) introduced issues related to standardization. Garrett Weinberg (Nuance) focused on issues related to voice user interfaces.
Following these presentations, and the accompanying lively discussions, workshop participants viewed eight posters.
Evaluation
At the end of the workshop we asked participants to indicate their level of agreement with these four statements:
- I found the workshop to be useful.
- I enjoyed the workshop.
- I would attend a similar workshop at a future AutomotiveUI conference.
- This workshop is the reason I am attending AutomotiveUI 2011.
The responses of 13 participants are shown below (the workshop organizers in attendance did not complete the questionnaire). They indicate that the workshop was a success.

Next steps
Since the conclusion of CLW 2012 co-organizers Peter Froehlich and Andrew Kun joined forces with Susanne Boll and Jim Foley to organize a workshop at CHI 2013 on automotive user interfaces. Also, a proposal for CLW 2013 at AutomotiveUI 2013 is in the works.
Thank you presenters and participants!
The organizers would like to extend our warmest appreciation to all of the presenters for the work that went into the expert presentations, the panel discussion, and the poster papers and presentations. We would also like to thank all of the workshop attendees for raising questions, discussing posters, and sharing their knowledge and expertise.
You can see more pictures from CLW 2012 on Flickr.